Projects
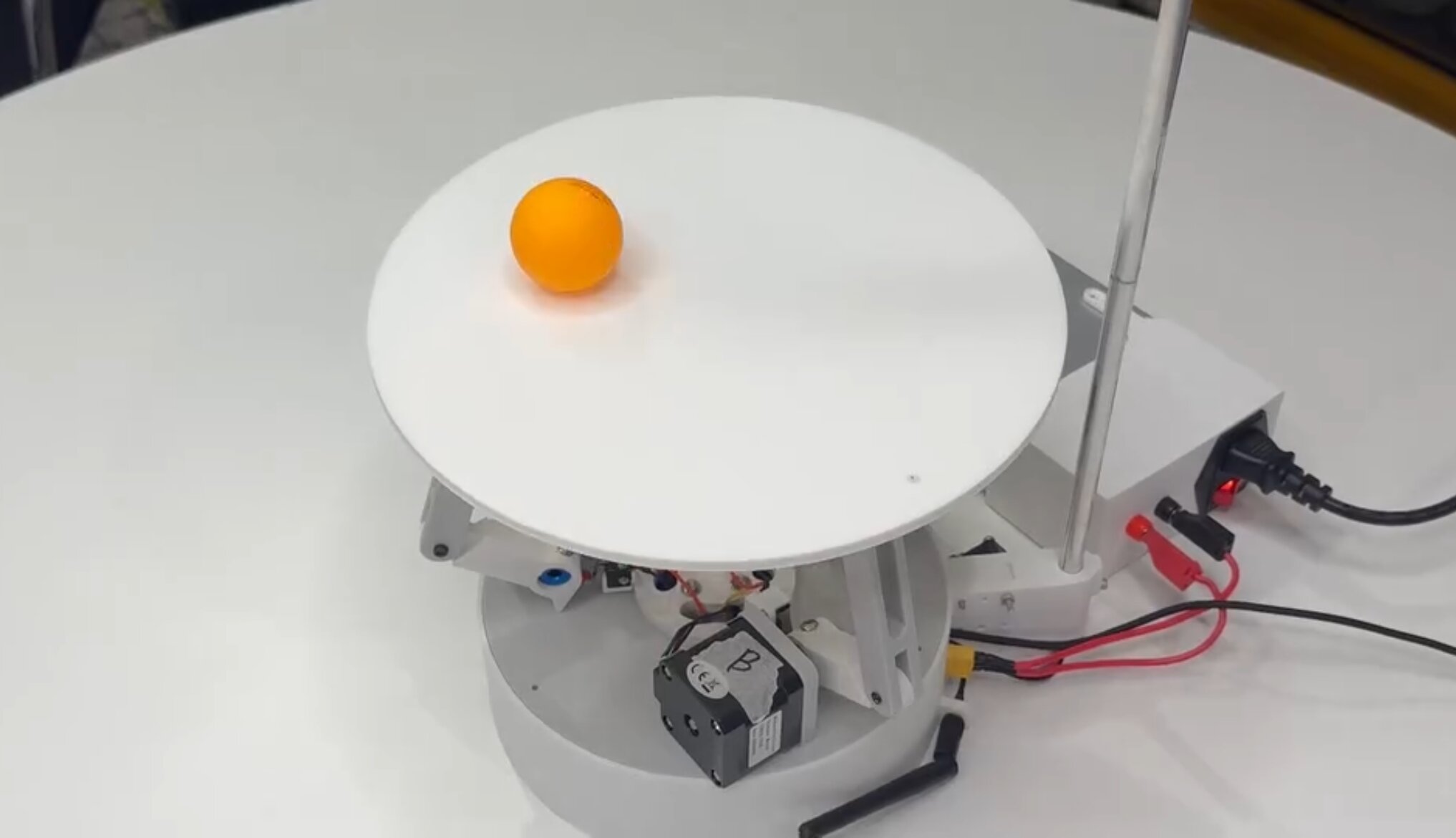
Ball Balancing Robot
ESP32
C++
Python
PID Control
Computer Vision
PCB Design
KiCad
Fusion 360
3D Printing
MATLAB
Created a high‑precision ball‑balancing robot using a custom 3RRS parallel manipulator, dual‑ESP32 control, and computer‑vision tracking, achieving a steady‑state error of under 1 mm from the target.

Sonos Teardown
drumel
microprobing
Electronics Teardown
PCB analysis
audio system design
Conducted detailed teardown analysis of Sonos Era speaker, documenting internal components, driver configuration, and PCB design. Created technical documentation with photos and assembly insights for engineering reference.